Nema 34 (86 mm) Hybrid-Linearschrittmotor

>> Kurzbeschreibungen
| Motorentyp | Bipolarer Stepper |
| Schrittwinkel | 1,8° |
| Spannung (V) | 3 / 4.8 |
| Strom (A) | 6 |
| Widerstand (Ohm) | 0,5 / 0,8 |
| Induktivität (mH) | 4 / 8.5 |
| Leitungsdrähte | 4 |
| Motorlänge (mm) | 76 / 114 |
| Umgebungstemperatur | -20℃ ~ +50℃ |
| Temperaturanstieg | 80.000 max. |
| Durchschlagsfestigkeit | 1 mA max.@ 500 V, 1 KHz, 1 Sek. |
| Isolationswiderstand | 100 MΩ Min.@500 VDC |
Der ACME-Schrittmotor mit Leitspindel wandelt die Drehbewegung mithilfe einer Leitspindel in eine lineare Bewegung um.Die Leitspindel hat verschiedene Kombinationen von Durchmesser und Steigung, um unterschiedliche Anwendungsanforderungen zu erfüllen.
Leitspindel-Schrittmotoren werden typischerweise in Anwendungen eingesetzt, die eine präzise lineare Bewegung, geringe Geräuschentwicklung und hohe Kosteneffizienz erfordern, wie z. B. medizinische Geräte, Telekommunikationsgeräte usw.
ThinkerMotion bietet eine vollständige Palette von Gewindespindel-Schrittmotoren (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) mit einem Lastbereich von 30 N bis 2400 N, und 3 Typen sind verfügbar (extern, unverlierbar, nicht unverlierbar).Kundenspezifische Anpassungen können auf Anfrage bearbeitet werden, z. B. Schraubenlänge und Schraubenende, Magnetbremse, Encoder, Anti-Backlash-Mutter usw.;und die Leitspindel kann auf Wunsch auch teflonbeschichtet werden.
>> Elektrische Parameter
| Motorgröße | Stromspannung /Phase (V) | Aktuell /Phase (EIN) | Widerstand /Phase (Ω) | Induktivität /Phase (mH) | Anzahl von Leitungsdrähte | Rotorträgheit (gcm2) | Motorgewicht (g) | Motorlänge L (mm) |
| 86 | 3 | 6 | 0,5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0,8 | 8.5 | 4 | 2500 | 5000 | 114 |
>> Leitspindelspezifikationen und Leistungsparameter
| Durchmesser (mm) | Führen (mm) | Schritt (mm) | Selbsthemmungskraft ausschalten (N) |
| 15.875 | 2.54 | 0,0127 | 2000 |
| 15.875 | 3.175 | 0,015875 | 1500 |
| 15.875 | 6.35 | 0,03175 | 200 |
| 15.875 | 12.7 | 0,0635 | 50 |
| 15.875 | 25.4 | 0,127 | 20 |
Hinweis: Bitte kontaktieren Sie uns für weitere Spezifikationen der Leitspindel.
>> 86E2XX-XXX-6-4-150 Umrisszeichnung des externen Standardmotors
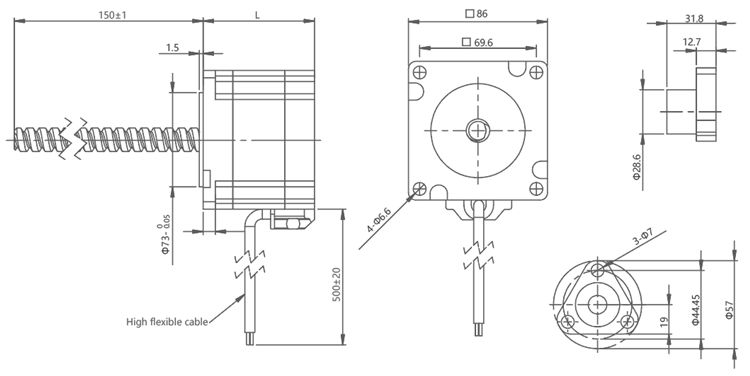
NAnmerkungen:
Die Länge der Leitspindel kann angepasst werden
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
>> 86NC2XX-XXX-6-4-S Umrisszeichnung des unverlierbaren Standardmotors
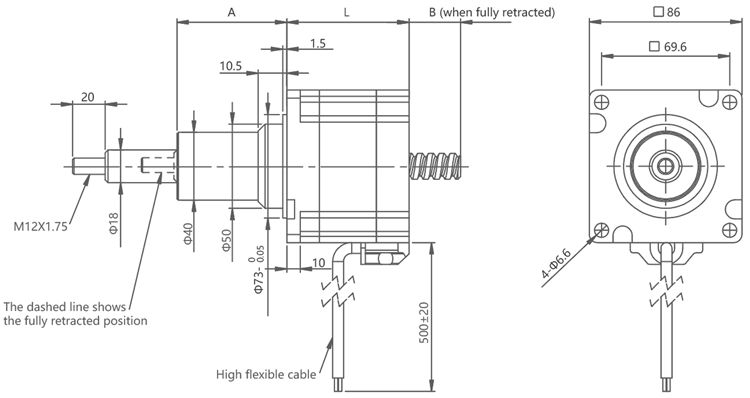
NAnmerkungen:
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
| Schlaganfall S (mm) | Maß A (mm) | Maß B (mm) | |
| L = 76 | L = 114 | ||
| 12.7 | 29.7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42.4 | 8.4 | 0 |
| 31.8 | 48.8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50.8 | 67.8 | 33.8 | 0 |
| 63.5 | 80.5 | 46.5 | 8.5 |
>> 86N2XX-XXX-6-4-150 Standard-Umrisszeichnung für nicht unverlierbaren Motor
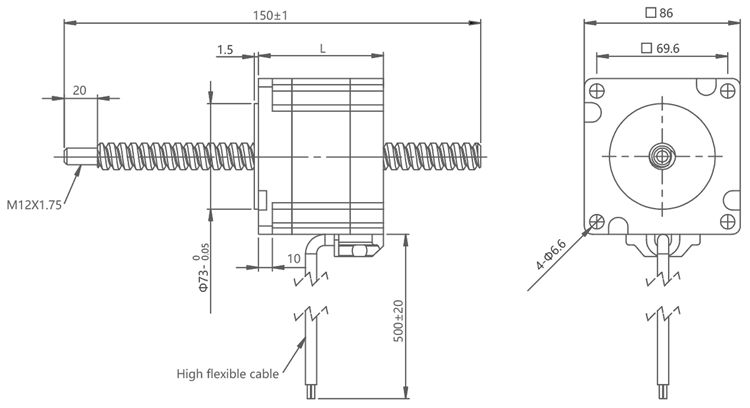
NAnmerkungen:
Die Länge der Leitspindel kann angepasst werden
Am Ende der Leitspindel ist eine kundenspezifische Bearbeitung möglich
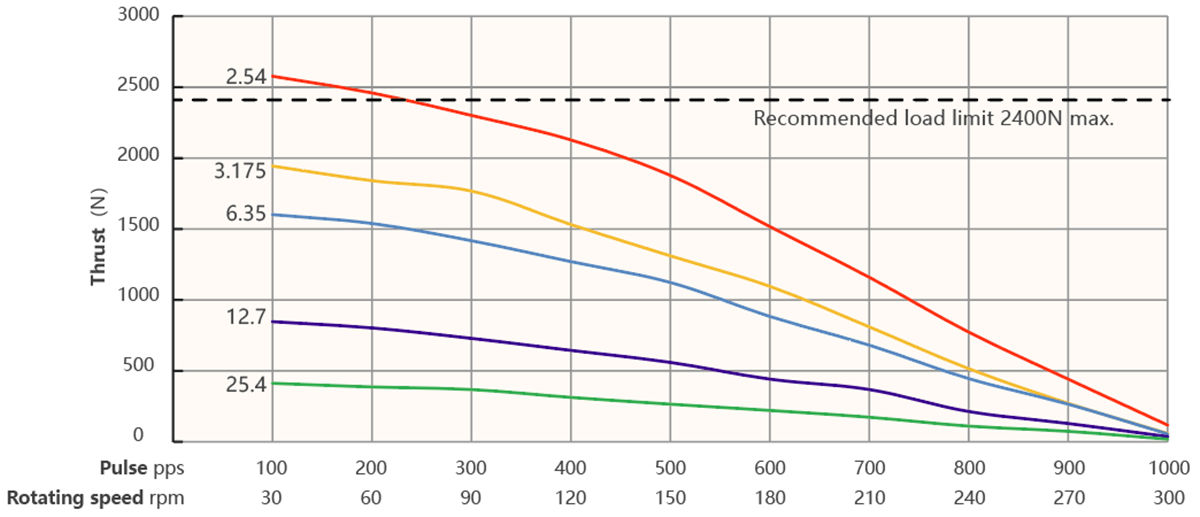
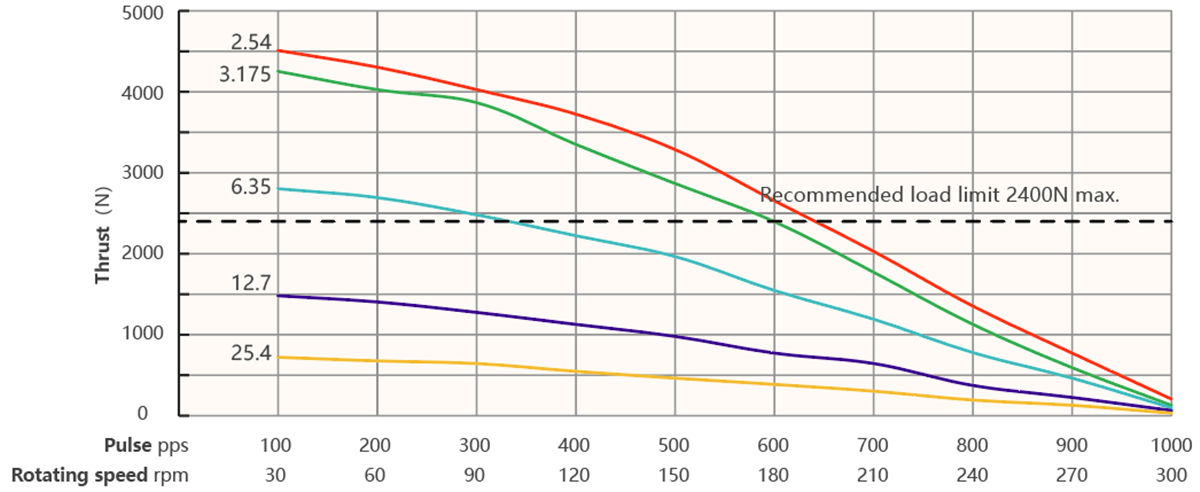
>> Geschwindigkeits- und Schubkurve
Serie 86 Bipolarer Chopper-Antrieb mit 76 mm Motorlänge
100 % Stromimpulsfrequenz und Schubkurve (Φ15,88 mm Leitspindel)
Bipolarer Chopper-Antrieb der Serie 86 mit 114 mm Motorlänge
100 % Stromimpulsfrequenz und Schubkurve (Φ15,88 mm Leitspindel)
| Steigung (mm) | Lineargeschwindigkeit (mm/s) | |||||||||
| 2.54 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 | 12.7 |
| 3.175 | 1,5875 | 3.175 | 4,7625 | 6.35 | 7,9375 | 9.525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6.35 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 | 31.75 |
| 12.7 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 | 63.5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 | 127 |
Testbedingung:
Chopper-Antrieb, kein Rampen, halber Mikroschritt, Antriebsspannung 40 V





